Autonomous system sensing must be strengthened not only against deliberate attacks, but also against the effects of harsh sensing environments. Such
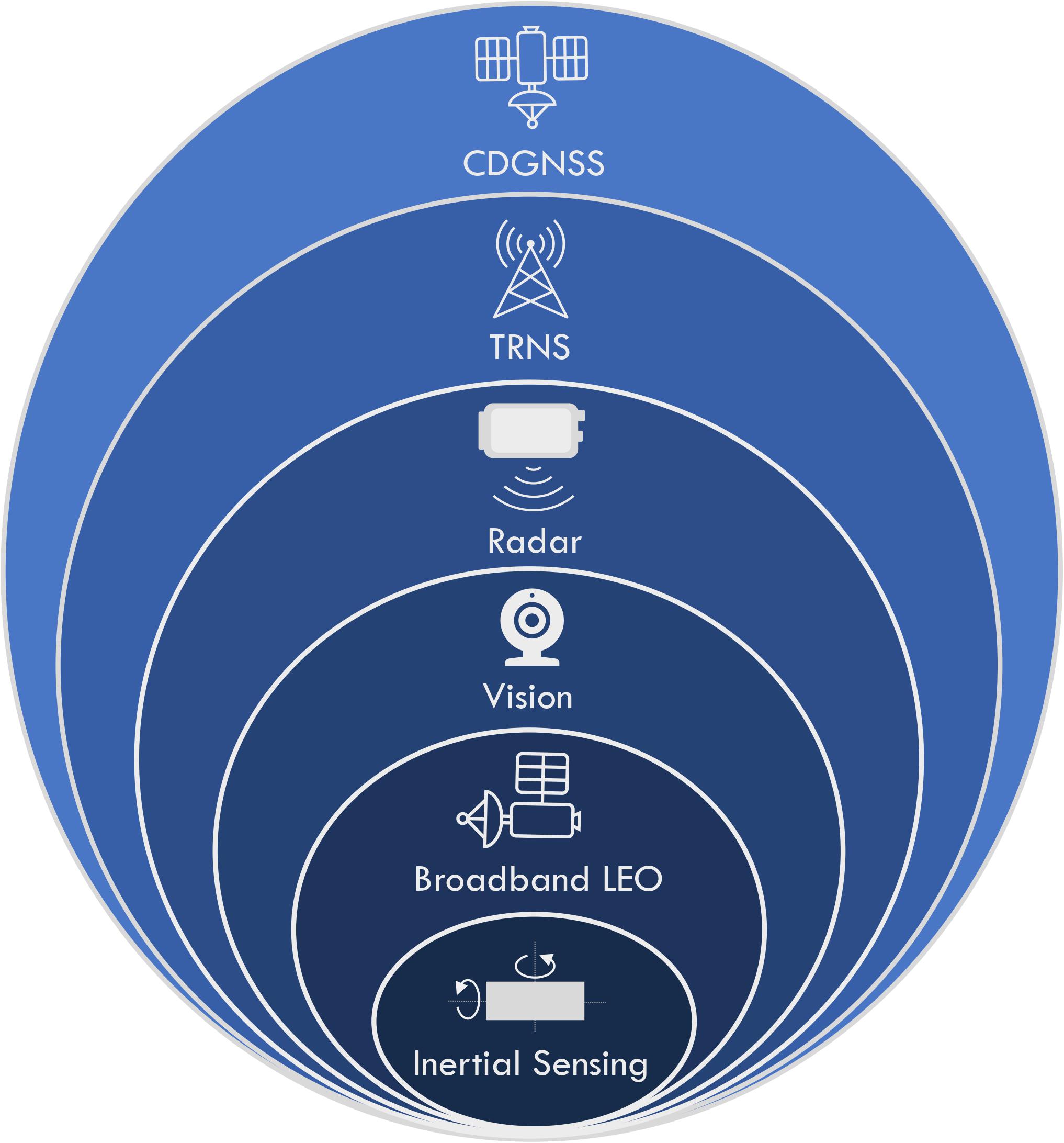
robust perception is critical for reliable navigation of autonomous systems, for collision avoidance, and for timing coordination. We pursue five lines of work to reach this goal:
- Precision Vision-Based Sensing for Autonomous Aerial and Road Vehicles
We are developing a novel fusion mechanism that combines GPS carrier phase measurements with camera images at the level of the bundle adjustment process. Bundle adjustment is central to robust visual simultaneous localization and mapping (SLAM). Our technique jointly resolves visual SLAM features and carrier phase (integer) ambiguities. The resulting tight coupling of GPS and vision exploits the extraordinary richness and strong keyframe-to-keyframe (temporal) correlation of visual data to achieve greater assuredness.
- Radar-Based Odometry for Ground and Aerial Vehicles
Autonomous vehicles must be equipped with a diversity of sensor types so that each can bridge gaps in the operating parameters of the others. For instance, when mud splashes on a camera lens, a GPS receiver will not be impacted. Frequency-modulated continuous-wave radar (FMCW) sensing is now ubiquitous in the automotive sector, making these devices plentiful and inexpensive. Radar can provide “odometry”, a direct measurement of a vehicle’s distance and direction of travel. While not a replacement for vision, being generally lesser in resolution and limited to two dimensions, FMCW excels under a portfolio of conditions quite distinct from those of other sensors: in dusty air, for instance; in low light, and in densely occluded environments where GNSS signals from the sky are blocked. However, radar units exhibit complex manufacturer- and movement-dependent behaviors that are not straightforward to incorporate into a rigorous statistical framework. We seek to more fully exploit these complex sensors for positioning and navigation through radar SLAM and through “tight fusion” of radar- and GNSS-based measurements.
- Urban PNT with Terrestrial Pseudo-lites
Another means to improve navigation in densely-occluded deep-urban environments is via stronger and nearer radio signal sources. Some such developments use “pseudo-lites”, or terrestrial devices that emulate key properties of navigation satellites: highly-stable clocks, well-known transmitter coordinates, and the transmission of specialized ranging codes. These pseudo-lites can create a terrestrial navigation system, (TRNS) that can be used as a supplement to GNSS. Fusion of positioning from traditional GNSS and TRNS will create a robust navigation solution, even in environments where traditional GNSS reception is inconsistent such as urban areas. In addition, fusion between TRNS and other robust sensing techniques will allow for robust PNT solution that is nearly independent of GNSS.
- Massive signal-of-opportunity utilization for PNT
An additional approach to robust perception extracts navigation and timing information from a large set of heterogeneous terrestrial and satellite signals-of-opportunity—essentially a diversity approach to robustness. The cooperative opportunistic navigation concept is at bottom an exercise in highly agile software-defined radio and in signal landscape SLAM, which differs from traditional landmark-based SLAM in that the landscape is dynamic. We have resolved fundamental questions of joint landscape and receiver state observability and have built a sophisticated software-defined multi-system radio.
- Mega-LEO constellation exploitation for PNT
The recent proliferation of Low Earth Orbit (LEO) satellite constellations created the opportunity to extract positioning navigation and timing (PNT) from LEO constellations. The mega-constellations of commercial satellites for broadband communication contain all the necessary hardware for PNT. A model for a fused LEO GNSS service has been explored and could achieve an order of magnitude better positioning than current GNSS, while being more resistant to interference. Current exploration is being performed on the utilizing the existing mega-LEO constellations for PNT. This will allow for a method for determining PNT from the existing signals form mega-LEO constellations.